



 029-86182630
029-86182630


新型托輥無源空間糾偏裝置
2023-04-20孫源 馮宜語
(棗莊科技職業學院)
0 引言
帶式輸送機跑偏在物料輸送過程中時有發生,是造成帶式輸送機局部或全線撒料、輸送帶邊緣磨損和撕裂的主要原因。研究證明造成輸送帶跑偏的因素很多,但歸根結底是輸送帶在運動中受力不平衡,形成了垂直于帶速方向的水平速度[1]。現階段,針對不同原因造成的輸送帶跑偏現象采取了不同的糾偏措施,現場經常使用的TD75、DTII標準糾偏托輥組是按現行行業標準設計制作的,經過現場驗證能夠實現糾偏目的,但在使用過程中存在托輥脫落、轉軸斷裂、連桿動作不協調、輸送帶磨損嚴重等缺陷。無源空間糾偏裝置在標準調偏托輥組的基礎上進行關鍵結構優化創新,采用多自由度的空間旋轉機構及可轉動立輥組合,從多個方面利用帶式輸送機的糾偏原理進行工作,可較好地解決上述問題。因此,無源空間糾偏裝置的研究意義重大。
1 無源空間糾偏裝置的結構分析
1.1 無源空間糾偏裝置的機械結構
無源空間糾偏裝置由糾偏托輥、糾偏支架、限位板、限位輪、糾偏旋轉座、立輥調節桿、立輥、固定連桿組成,見圖1。其中糾偏支架設計有三個支承面,三個支承面設計呈凹型,糾偏托輥設置在糾偏支架的支承面上,糾偏支架通過糾偏旋轉座連接到固定連桿上,固定連桿固定在輸送機的支架上,立輥通過立輥調節桿固定在糾偏支架的一端,限位板設置在固定連桿的一端,限位輪也設置在糾偏支架一端,且限位板和限位輪設置為相切,限位板沿輸送帶運行方向前高后低設置。

1. 糾偏托輥;2. 糾偏支架;3. 固定連桿;4. 糾偏旋轉座;5. 限位板;6. 限位輪;7. 立輥調節桿;8. 立輥
圖1 無源空間糾偏裝置結構圖
1.2 無源空間糾偏裝置關鍵結構優化
普通調心托輥糾偏支架只能以固定的圓心前后移動[2]。無源空間糾偏裝置采用空間旋轉機構,如圖2。機構內部使用兩個萬向軸承,糾偏支架有水平和豎直兩個方向的自由度,即可以使糾偏支架以糾偏旋轉座為中心同時前后移動和上下移動。裝置中限位板和限位輪為相切關系(見圖1),可較好地控制糾偏支架的運動軌跡。在動作過程中,不僅可實現前后移動糾偏,而且可實現上下移動糾偏,糾偏更加迅速,糾偏力更大。這種結構的改進,改變了原有的標準型糾偏托輥組只能在平面內進行糾偏動作的狀況。
標準型糾偏托輥組左右立輥只有一個,無源空間糾偏裝置每一側使用兩個立輥,這樣使得膠帶觸發立輥的動作更可靠,反應更靈敏,同時會減少膠帶的磨損。

圖2 糾偏旋轉座
2 無源多自由度糾偏裝置的工作原理
帶式輸送機的常用糾偏方式是沿膠帶運行方向,輸送帶往哪側偏托輥組就相應向前調整以達到糾偏目的。無源空間糾偏裝置在輸送帶跑偏時,輸送帶給立輥施加作用力,通過立輥調節桿使糾偏支架繞糾偏旋轉座豎直中心線轉動,并推動糾偏托輥沿糾偏旋轉座豎直中心線轉動,即向輸送帶運行方向旋轉,使糾偏托輥中心線投影與輸送帶中心線有一定夾角,過程如圖3所示。

圖3 輸送帶跑偏示意
輸送帶向前運行時給托輥一個向前的牽引力Fq,這個牽引力分解為使托輥轉動的分力Fz和一個橫向分力Fc,Fc使托輥軸向竄動,由于托輥支架的固定限制托輥軸向竄動,它必然就會對膠帶產生一個反作用力Fy,使膠帶向另一側移動,如圖4所示,從而實現糾偏目的。

圖4 托輥受力分析
在限位板的作用下,限位輪沿限位板的接觸面運動,帶動糾偏支架在多自由度旋轉機構的運動極限范圍內致跑偏一側抬高,如圖5所示,在抬高過程中促使糾偏支架在兩個自由度內運動。無源空間糾偏裝置在空間上給予跑偏膠帶一組向心力(向帶式輸送機中心線),以達到糾偏目的。限位板角度可調,可根據需要調節抬高值,更便于糾偏。
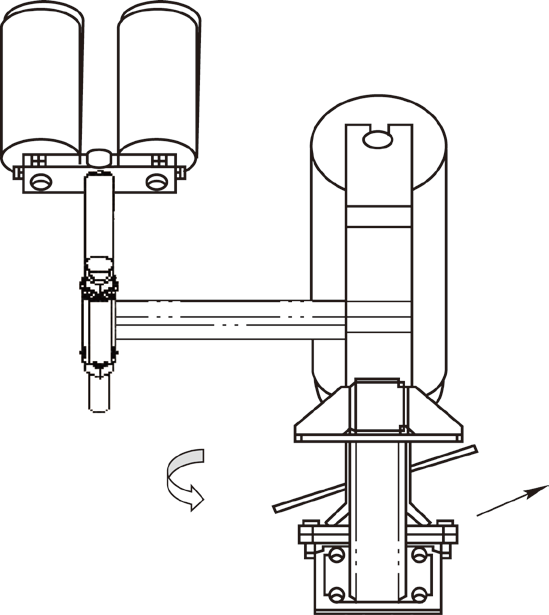
圖5 糾偏托輥上下運動示意圖
3 總結
無源空間糾偏裝置是在標準型糾偏托輥組的基礎上優化改進而成,該糾偏裝置無動力源、可實現空間糾偏;全機械結構,結構簡單、安裝維護方便;具有合理的限位機構,自動調節,功能可靠;具有更大的糾偏范圍。無源糾偏裝置具有非常大的發展空間,且具有廣泛的應用前景,推廣價值極高。
(來源:起重運輸機械雜志社)






